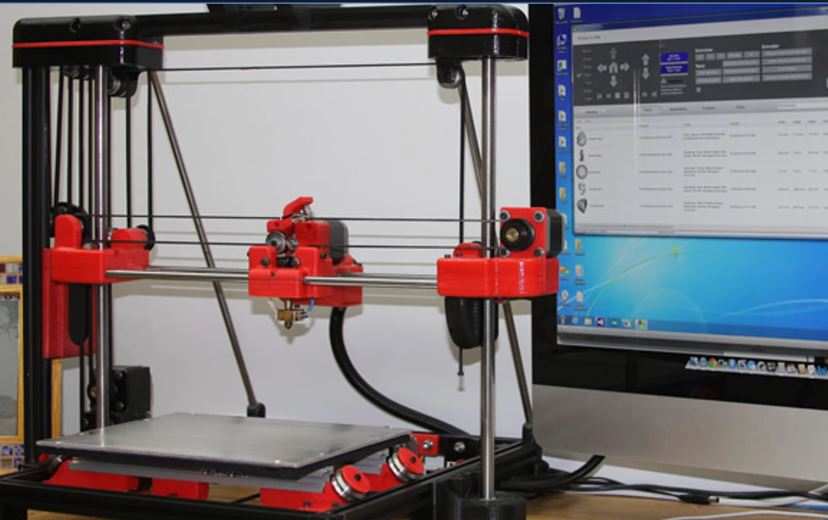
Thiết kế:Do nhu yếu cần in một số quy mô để giao hàng mấy món ăn uống chơi đề nghị mình cũng đầu tư mua 1 nhỏ mini Delta. Nguyên nhân lại là Delta? vì chưng thấy nó kỳ lạ về hình dáng dáng, thiết kế, kiểu gửi động, cùng để đọc thêm hệ tọa độ này.Chỉ sau vài tuần là em cảm giác chán em Delta này rồi, vì hành trình dài in quá nhỏ tuổi không đầy đủ so với nhu cầu của mình. Dẫu vậy trên thị phần lại ko tìm kiếm được máy Delta khủng hơn, vậy là mình cần cố tự làm lấy 1 bé để giao hàng nhu cầu
Thông số kỹ thuật:Kết cấu: Nhôm profile 30x60 (ve chai)Chuyển động: ray THK SSR15Chiều cao máy: 900 milimet (không tính cuộn vật liệu nhựa in nếu để lên trên trên)Khối lượng: ~ 18 kg
Kích thước in: trụ đường kính 300mm, cao 300mm
Công suất: ~ 180 w (12V – 15A)Tốc độ in: đôi mươi – 100 mm/s
Chiều dày lớp in: 0.05 – 0.4 mm
Đường kính lỗ đùn nhựa: 0.3; 0.4; 0.5 mm (mặc định 0.4 mm)Loại vật liệu bằng nhựa in: PLA hoặc ABS 1.75 mm


Shape 2012)https://drive.google.com/open?id=0B2...Egz
Wmst
Nldn
Vm
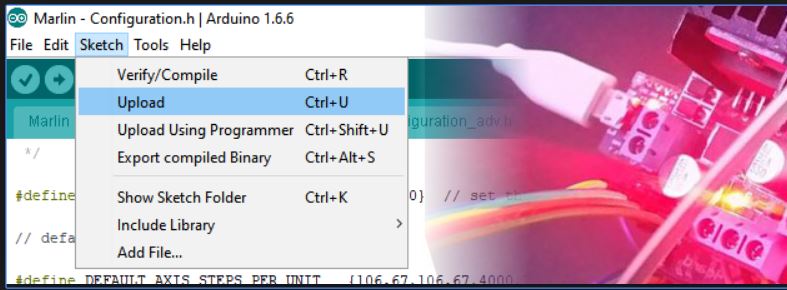
MFirmware Marlin nạp đến máy:https://drive.google.com/open?id=0B2...zdl
Z0pf
WXdz
QXc
Hướng dẫn cách căn chỉnhCó rất nhiều hướng dẫn về việc hiệu chỉnh sản phẩm công nghệ in Delta. Một trong những phương pháp bằng tay không chính xác có thể làm cho chậm quy trình hiệu chỉnh cùng cho tác dụng không được như ước ao đợi. Nội dung bài viết này mình sẽ chia sẻ cách hiệu chỉnh sớm nhất có thể theo như bản thân biết===================To be continue...Tower Zero Level...Rod Length...Delta Radius...
Bạn đang xem: Thiết lập marlin cho máy in 3d delta


biết tuốt

Thợ cả


Bài viết 2,053 Cám ơn 764 Được cám ơn 629 lần ngơi nghỉ 445 nội dung bài viết
delta ưu thế in vật bao gồm chiều cao,dự ớn 3 chiều của tui đang dần đắp chiếu , thử nghiệm hết cả rùi còn từng đoạn lên size nữa nhưng mà nhác

Để máy chuyển động cần phải tất cả vi tinh chỉnh và điều khiển để điều khiển hoạt động vui chơi của máy, nhằm vi điều khiển có thể điều khiển chính xác các trang bị phần cứng trong máy cần phải có firmware cân xứng với các thông số tương xứng tương thích với hartware của máy. Đối với quy mô máy in 3D, thực hiện firmware Marlin là firmware phổ biến nhất dễ dãi tùy phát triển thành các thông số kỹ thuật để tương xứng với các cấu hình phần cứng của các loại máy in 3d khác nhau. Những thông số cần thiết lập mang đến firmware bao gồm: tùy chỉnh thiết lập thông số board mạch, cảm ứng nhiệt, các thông số cho bộ động cơ bước, cỗ đùn nhựa, đầu dò (nếu có), thông số bộ PID điều khiển vận tốc động cơ, ….
Thiết lập thông số Baudrate: Để bài toán truyền và nhận duy trì liệu được đồng điệu thì giữa vi tinh chỉnh và phần mềm giao tiếp phải cùng một thông số baudrate. Baudrate là thông số kỹ thuật chỉ số bit truyền vào 1s. Để tùy chỉnh cấu hình thông số baudrate, đổi khác chỉ số của mẫu lệnh thành thông số baudrate cần thiết lập. Một số trong những thông số rất có thể sử dụng như 9600, 11250, 25000, …
#define BAUDRATE 250000.
Thiết lập thông số về board mạch: có khá nhiều board mạch có thể sử dụng để điều khiển và tinh chỉnh máy in 3d như RAMPS, MELZI, … từng board mạch sẽ sở hữu thông số tùy chỉnh cấu hình khác nhau để tương thích với firmware. Tùy chỉnh thiết lập thông số board mạch trong loại lệnh dưới :
#ifndef MOTHERBOARD
#define MOTHERBOARD BOARD_RAMPS_13_EFB
#endif.
Thiết lập số lượng đầu phun: chuyển đổi số lượng đầu phun trong mẫu lệnh sau:
#define EXTRUDERS 1
Thiết lập giá chỉ trị cảm biến nhiệt: giống như như cấu hình thiết lập thông số board mạch thì từng loại cảm biến nhiệt có 1 giá trị không giống nhau, firmware marlin cung cấp tối nhiều 3 cảm biến nhiệt đến đầu xịt nhựa với 1 cảm biến nhiệt cho bàn nhiệt.
Xem thêm: 5+ cách giảm stress hiệu quả nhất, cách giảm stress hiệu quả tức thì dù bệnh đã nặng
#define TEMP_SENSOR_0 6
#define TEMP_SENSOR_1 0
#define TEMP_SENSOR_2 0
#define TEMP_SENSOR_BED 0
Thiết lập tọa độ dịch chuyển cho máy: để máy motor tảo đúng chiều theo hệ tọa độ thì ta phải phải tùy chỉnh cấu hình thông số trong firmware. Dùng phương thức thử không đúng để cấu hình thiết lập các thông số kỹ thuật này. Cho những trục tọa độ dịch chuyển theo một phương độc nhất vô nhị định, ví như trục tọa độ di chuyển ngược hướng thì biến đổi câu lệnh trường đoản cú True thành False hoặc ngược lại. Cấu hình thiết lập tọa độ máy trong các câu lệnh sống dưới:
#define INVERT_X_DIR true
#define INVERT_Y_DIR true
#define INVERT_Z_DIR true
#define INVERT_E0_DIR false
#define INVERT_E1_DIR false
#define INVERT_E2_DIR false
Thay đổi hướng đến home của 3 trục tọa độ: trước lúc máy bắt đầu in thì các trục tọa độ phải về gốc tọa độ nhằm gia nhiệt cho đầu phun, bàn nhiệt, … Để những trục di chuyển về cội tọa độ tương xứng ta quan trọng lập hướng di chuyển cho những trục. Phương thức thiết lập giống như như thiết lập cấu hình tọa độ dịch chuyển cho máy, nếu hướng về home không hề muốn thì đổi giá trị từ -1 thành 1 hoặc ngược lại. Các thông số được thiết lập trong những câu lệnh sau:
#define X_HOME_DIR -1
#define Y_HOME_DIR -1
#define Z_HOME_DIR -1
Thiết lập không gian làm vấn đề cho máy: cần được giới hạn không khí làm việc của máy theo như hartware đã thiết kế là thêm đặt. Các thiết lập về không gian làm việc của dòng sản phẩm được biến hóa ở hầu như câu lệnh dưới đây:
#define X_MAX_POS 200
#define X_MIN_POS 0
#define Y_MAX_POS 200
#define Y_MIN_POS 0
#define Z_MAX_POS 200
#define Z_MIN_POS 0
Thiết lập số trục tọa độ: Firmware cung cấp điều khiển về tối đa 5 trục tương ứng với 3 truc X, Y, Z với 2 trục tọa độ khớp ứng với 2 đầu phun nhựa. Thay đổi các thông số trong câu lệnh sau:
#define NUM_AXIS 4
Thiết lập tốc độ về home: Thông số tùy chỉnh cấu hình tốc độ khi đưa những trục về cội tọa độ, biến đổi các thông số kỹ thuật trong câu lệnh:
#define HOMING_FEEDRATE 50*60, 50*60, 4*60, 0
Thiết lập các thông số về tốc độ tối đa và gia tốc tối đa của những trục trong các câu lệnh sau:
#define DEFAULT_MAX_FEEDRATE 500, 500, 5, 25 // (mm/sec)
#define DEFAULT_MAX_ACCELERATION 9000,9000,100,10000
Thiết lập module LCD: Nếu sử dụng LCD để tiếp xúc điều khiển sản phẩm công nghệ in ta chuyển đổi thiết lập vào firmware bằng cách thêm cái lệnh sau vào firmware:
#define REPRAP_DISCOUNT_SMART_CONTROLLER
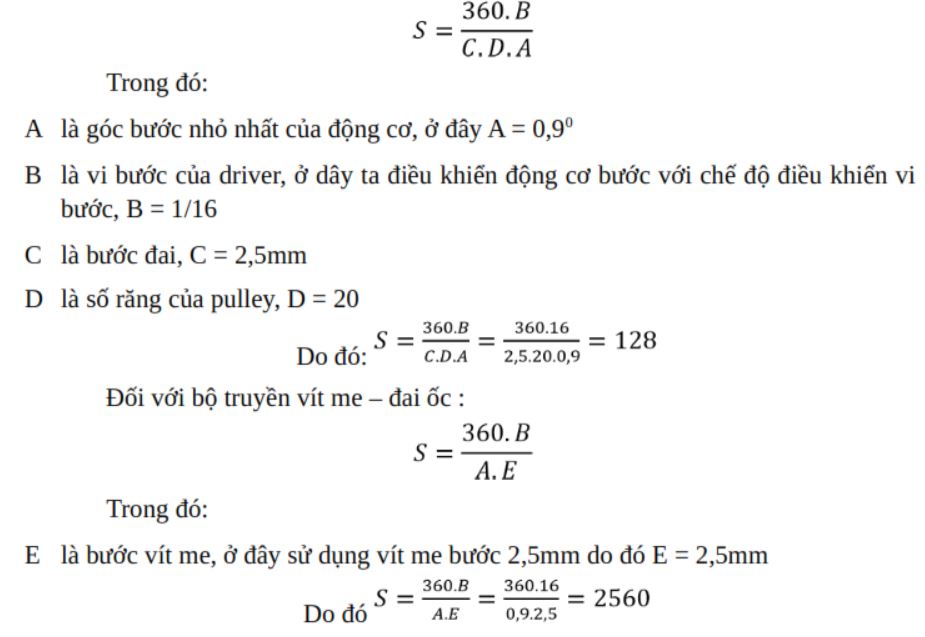
Thiết lập thông số step/mm: Đây là thông số quan trọng đặc biệt nhất lúc điều khiển, nó xác minh giá trị số vòng quay cần thiết của động cơ để vít me hoặc đai di chuyển được 1mm. Để thiết lập cấu hình các thông số kỹ thuật này cần triển khai qua 2 bước:
Bước 1: đo lường sơ bộ giá trị step/mm.
Bước 2: tinh chỉnh và điều khiển lại những thông số.
Tính toán sơ bộ các giá trị: tùy nằm trong vào bộ truyền cùng cách tinh chỉnh động nhưng các thông số kỹ thuật này không giống nhau
Đối với cỗ truyền đai:
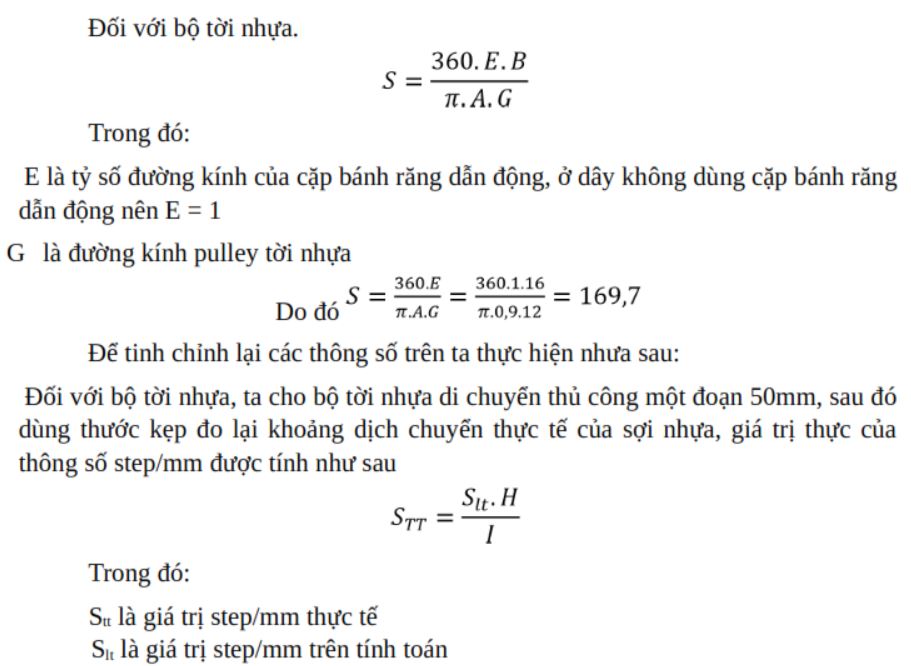
H là khoảng dịch rời thủ công, (H = 50mm) I là khoảng dịch chuyển thực tế.
Đối với các trục X, Y, Z ta in thử chủng loại in dạng hôp có size 50x50x50 mm, kế tiếp đo lại các kích thước và thực hiện giám sát lại các thông số như công thức ở trên.
Lặp lại công việc canh chĩnh trên nhiều lần để rất có thể đạt giá chỉ trị chính xác nhất. Sau khi có những giá trị yêu cầu thiết, tùy chỉnh thiết lập lại các thông số kỹ thuật trong các dòng lệnh sau:














